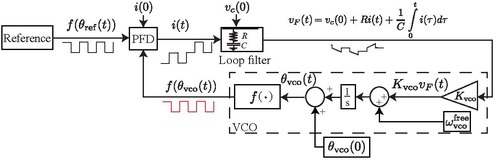
电荷泵锁相回路 电荷泵锁相回路 (Charge-pump phase-locked loop)简称CP-PLL ,是一种鉴相器 适用于方波 输入信号的锁相回路 [ 1] [ 2]
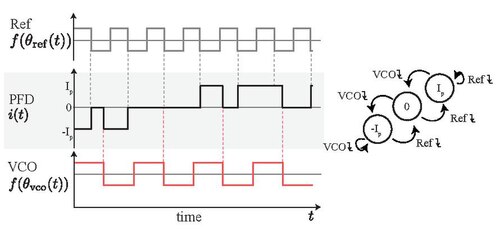
鉴相器动态 鉴相器(PFD)是由参考信号(Ref)以及受控输出(VCO)信号的下缘所触发。PFD
i
(
t
)
{\displaystyle i(t)}
+
I
p
{\displaystyle +I_{p}}
−
I
p
{\displaystyle -I_{p}}
+
I
p
{\displaystyle +I_{p}}
−
I
p
{\displaystyle -I_{p}}
第一个二阶CP-PLL的数学模型是由佛洛依德·加德纳 [ 2] [ 3] [ 4] [ 5]
CP-PLL的数学模型可以针对一些参数进行解析的预估,例如hold-in范围(在VCO没有过载的情形下,可能进行锁相的输入信号频率范围),及捕获范围(pull-in range,在CP-PLL任意初始状态下,CP-PLL最终可以锁相的输入信号频率范围)[ 6]
[ 编辑 ] 加德纳的分析是以以下的近似为基础[ 2]
t
p
=
|
θ
e
|
/
ω
r
e
f
,
θ
e
=
θ
r
e
f
−
θ
v
c
o
.
{\displaystyle t_{p}=|\theta _{e}|/\omega _{\rm {ref}},\ \theta _{e}=\theta _{\rm {ref}}-\theta _{\rm {vco}}.}
CP-PLL的PDF平均输出为
i
d
=
I
p
θ
e
/
2
π
{\displaystyle i_{d}=I_{p}\theta _{e}/2\pi }
对应的传递函数为
I
d
(
s
)
=
I
p
θ
e
(
s
)
/
2
π
{\displaystyle I_{d}(s)=I_{p}\theta _{e}(s)/2\pi }
若用滤波器传递函数
F
(
s
)
=
R
+
1
C
s
{\displaystyle F(s)=R+{\frac {1}{Cs}}}
θ
v
c
o
(
s
)
=
K
v
c
o
I
d
(
s
)
F
(
s
)
/
s
{\displaystyle \theta _{\rm {vco}}(s)=K_{\rm {vco}}I_{d}(s)F(s)/s}
θ
e
(
s
)
θ
r
e
f
(
s
)
=
2
π
s
2
π
s
+
K
v
c
o
I
p
(
R
+
1
C
s
)
.
{\displaystyle {\frac {\theta _{e}(s)}{\theta _{\rm {ref}}(s)}}={\frac {2\pi s}{2\pi s+K_{\rm {vco}}I_{p}\left(R+{\frac {1}{Cs}}\right)}}.}
佛洛依德·加德纳 [ 2] :1856 (加德纳对CP-PLL的猜想)。
依照加德纳的结果,也类似Egan在type 2 APLL捕获范围的猜想,Amr M. Fahim在其书中猜想[ 7] :6 :为了要达到无限大的捕获范围,CP-PLL的回路滤波器需要使用主动滤波器(Fahim-Egan在type II CP-PLL捕获范围的猜想)。
为了简化推导,但不失去通用性,假设VCO和参考信号在其相位为整数时为其下降缘。
令参考信号第一个下降缘的时间为
t
=
0
{\displaystyle t=0}
i
(
0
)
{\displaystyle i(0)}
i
(
0
−
)
{\displaystyle i(0-)}
θ
v
c
o
(
0
)
{\displaystyle \theta _{vco}(0)}
θ
r
e
f
(
0
)
{\displaystyle \theta _{ref}(0)}
若利用电阻和电容制作纯PI(比例积分)的滤波器,其输入电流
i
(
t
)
{\displaystyle i(t)}
v
F
(
t
)
{\displaystyle v_{F}(t)}
v
F
(
t
)
=
v
c
(
0
)
+
R
i
(
t
)
+
1
C
∫
0
t
i
(
τ
)
d
τ
{\displaystyle {\begin{aligned}v_{F}(t)=v_{c}(0)+Ri(t)+{\frac {1}{C}}\int \limits _{0}^{t}i(\tau )d\tau \end{aligned}}}
其中
R
>
0
{\displaystyle R>0}
C
>
0
{\displaystyle C>0}
v
c
(
t
)
{\displaystyle v_{c}(t)}
v
F
(
t
)
{\displaystyle v_{F}(t)}
θ
˙
v
c
o
(
t
)
=
ω
v
c
o
(
t
)
=
ω
v
c
o
free
+
K
v
c
o
v
F
(
t
)
,
{\displaystyle {\begin{aligned}{\dot {\theta }}_{vco}(t)=\omega _{vco}(t)=\omega _{vco}^{\text{free}}+K_{vco}v_{F}(t),\end{aligned}}}
其中
ω
v
c
o
free
{\displaystyle \omega _{vco}^{\text{free}}}
v
F
(
t
)
≡
0
{\displaystyle v_{F}(t)\equiv 0}
K
v
c
o
{\displaystyle K_{vco}}
θ
v
c
o
(
t
)
{\displaystyle \theta _{vco}(t)}
v
˙
c
(
t
)
=
1
C
i
(
t
)
,
θ
˙
v
c
o
(
t
)
=
ω
v
c
o
free
+
K
v
c
o
(
R
i
(
t
)
+
v
c
(
t
)
)
{\displaystyle {\begin{aligned}{\dot {v}}_{c}(t)={\tfrac {1}{C}}i(t),\quad {\dot {\theta }}_{vco}(t)=\omega _{vco}^{\text{free}}+K_{vco}(Ri(t)+v_{c}(t))\end{aligned}}}
其中有以下的不连续分段常数非线性
i
(
t
)
=
i
(
i
(
t
−
)
,
θ
r
e
f
(
t
)
,
θ
v
c
o
(
t
)
)
{\displaystyle i(t)=i{\big (}i(t-),\theta _{ref}(t),\theta _{vco}(t){\big )}}
初始条件为
(
v
c
(
0
)
,
θ
v
c
o
(
0
)
)
{\displaystyle {\big (}v_{c}(0),\theta _{vco}(0){\big )}}
在时间区间内的PFD动态 假设参考信号频率为常数:
θ
r
e
f
(
t
)
=
ω
r
e
f
t
=
t
T
r
e
f
,
{\displaystyle \theta _{ref}(t)=\omega _{ref}t={\frac {t}{T_{ref}}},}
T
r
e
f
{\displaystyle T_{ref}}
ω
r
e
f
{\displaystyle \omega _{ref}}
θ
r
e
f
(
t
)
{\displaystyle \theta _{ref}(t)}
令
t
0
=
0
{\displaystyle t_{0}=0}
t
0
m
i
d
d
l
e
{\displaystyle t_{0}^{\rm {middle}}}
i
(
0
)
=
0
{\displaystyle i(0)=0}
t
0
m
i
d
d
l
e
=
0
{\displaystyle t_{0}^{\rm {middle}}=0}
t
1
{\displaystyle t_{1}}
{
t
k
}
{\displaystyle \{t_{k}\}}
{
t
k
m
i
d
d
l
e
}
{\displaystyle \{t_{k}^{\rm {middle}}\}}
k
=
0
,
1
,
2...
{\displaystyle k=0,1,2...}
令
t
k
<
t
k
m
i
d
d
l
e
{\displaystyle t_{k}<t_{k}^{\rm {middle}}}
t
∈
[
t
k
,
t
k
m
i
d
d
l
e
)
{\displaystyle t\in [t_{k},t_{k}^{\rm {middle}})}
sign
(
i
(
t
)
)
{\displaystyle {\text{sign}}(i(t))}
±
1
{\displaystyle \pm 1}
τ
k
{\displaystyle \tau _{k}}
τ
k
=
(
t
k
m
i
d
d
l
e
−
t
k
)
sign
(
i
(
t
)
)
{\displaystyle \tau _{k}=(t_{k}^{\rm {middle}}-t_{k}){\text{sign}}(i(t))}
t
∈
[
t
k
,
t
k
m
i
d
d
l
e
)
{\displaystyle t\in [t_{k},t_{k}^{\rm {middle}})}
τ
k
=
0
{\displaystyle \tau _{k}=0}
t
k
=
t
k
m
i
d
d
l
e
{\displaystyle t_{k}=t_{k}^{\rm {middle}}}
若VCO的下降缘在参考信号的下降缘之前,则
τ
k
<
0
{\displaystyle \tau _{k}<0}
τ
k
>
0
{\displaystyle \tau _{k}>0}
τ
k
{\displaystyle \tau _{k}}
(
t
k
m
i
d
d
l
e
,
t
k
+
1
)
{\displaystyle (t_{k}^{\rm {middle}},t_{k+1})}
i
(
t
)
≡
0
{\displaystyle i(t)\equiv 0}
v
F
(
t
)
≡
v
k
{\displaystyle v_{F}(t)\equiv v_{k}}
t
∈
[
t
k
m
i
d
d
l
e
,
t
k
+
1
)
{\displaystyle t\in [t_{k}^{\rm {middle}},t_{k+1})}
将
(
τ
k
,
v
k
)
{\displaystyle (\tau _{k},v_{k})}
[ 8]
p
k
=
τ
k
T
r
e
f
,
u
k
=
T
r
e
f
(
ω
v
c
o
free
+
K
v
c
o
v
k
)
−
1
,
{\displaystyle p_{k}={\frac {\tau _{k}}{T_{\rm {ref}}}},u_{k}=T_{\rm {ref}}(\omega _{\rm {vco}}^{\text{free}}+K_{\rm {vco}}v_{k})-1,}
α
=
K
v
c
o
I
p
T
r
e
f
R
,
β
=
K
v
c
o
I
p
T
r
e
f
2
2
C
.
{\displaystyle \alpha =K_{\rm {vco}}I_{p}T_{\rm {ref}}R,\beta ={\frac {K_{\rm {vco}}I_{p}T_{\rm {ref}}^{2}}{2C}}.}
此处
p
k
{\displaystyle p_{k}}
u
k
+
1
{\displaystyle u_{k}+1}
ω
v
c
o
free
+
K
v
c
o
v
k
{\displaystyle \omega _{\rm {vco}}^{\text{free}}+K_{\rm {vco}}v_{k}}
1
T
r
e
f
{\displaystyle {\frac {1}{T_{\rm {ref}}}}}
最后,不考虑VCO过载的二阶CP-PLL离散时间模型如下[ 4] [ 6]
u
k
+
1
=
u
k
+
2
β
p
k
+
1
,
p
k
+
1
=
{
−
(
u
k
+
α
+
1
)
+
(
u
k
+
α
+
1
)
2
−
4
β
c
k
2
β
,
for
p
k
≥
0
,
c
k
≤
0
,
1
u
k
+
1
−
1
+
(
p
k
mod
1
)
,
for
p
k
≥
0
,
c
k
>
0
,
l
k
−
1
,
for
p
k
<
0
,
l
k
≤
1
,
−
(
u
k
+
α
+
1
)
+
(
u
k
+
α
+
1
)
2
−
4
β
d
k
2
β
,
for
p
k
<
0
,
l
k
>
1
,
{\displaystyle {\begin{aligned}&u_{k+1}=u_{k}+2\beta p_{k+1},\\&p_{k+1}={\begin{cases}{\frac {-(u_{k}+\alpha +1)+{\sqrt {(u_{k}+\alpha +1)^{2}-4\beta c_{k}}}}{2\beta }},\quad {\text{ for }}p_{k}\geq 0,\quad c_{k}\leq 0,\\{\frac {1}{u_{k}+1}}-1+(p_{k}{\text{ mod }}1),\quad {\text{ for }}p_{k}\geq 0,\quad c_{k}>0,\\l_{k}-1,\quad {\text{ for }}p_{k}<0,\quad l_{k}\leq 1,\\{\frac {-(u_{k}+\alpha +1)+{\sqrt {(u_{k}+\alpha +1)^{2}-4\beta d_{k}}}}{2\beta }},\quad {\text{ for }}p_{k}<0,\quad l_{k}>1,\end{cases}}\end{aligned}}}
其中
c
k
=
(
1
−
(
p
k
mod
1
)
)
(
u
k
+
1
)
−
1
,
S
l
k
=
−
(
u
k
−
α
+
1
)
p
k
+
β
p
k
2
,
l
k
=
1
−
(
S
l
k
mod
1
)
u
k
+
1
,
d
k
=
(
S
l
k
mod
1
)
+
u
k
.
{\displaystyle {\begin{aligned}c_{k}=(1-(p_{k}{\text{ mod }}1))(u_{k}+1)-1,S_{l_{k}}=-(u_{k}-\alpha +1)p_{k}+\beta p_{k}^{2},l_{k}={\frac {1-(S_{l_{k}}{\text{ mod }}1)}{u_{k}+1}},d_{k}=(S_{l_{k}}{\text{ mod }}1)+u_{k}.\end{aligned}}}
此离散时间模型只在
(
u
k
=
0
,
p
k
=
0
)
{\displaystyle (u_{k}=0,p_{k}=0)}
[ 6]
若VCO过载,也就是
θ
˙
v
c
o
(
t
)
{\displaystyle {\dot {\theta }}_{\rm {vco}}(t)}
(
p
k
>
0
,
u
k
<
2
β
p
k
−
1
)
{\displaystyle (p_{k}>0,u_{k}<2\beta p_{k}-1)}
(
p
k
<
0
,
u
k
<
α
−
1
)
{\displaystyle (p_{k}<0,u_{k}<\alpha -1)}
[ 5]
高阶CP-PLL非线性模型推导和超越方程有关,无法求得解析解,需要用近似的方式计算[ 9]
^ USA US3714463A ,Jon M. Laune,“Digital frequency and/or phase detector charge pump”,发表于1973-01-30 ^ 2.0 2.1 2.2 2.3 F. Gardner. Charge-pump phase-lock loops. IEEE Transactions on Communications. 1980, 28 (11): 1849–1858. Bibcode:1980ITCom..28.1849G doi:10.1109/TCOM.1980.1094619 ^ M. van Paemel. Analysis of a charge-pump pll: A new model. IEEE Transactions on Communications. 1994, 42 (7): 2490–2498. doi:10.1109/26.297861 ^ 4.0 4.1 N. Kuznetsov, M. Yuldashev, R. Yuldashev, M. Blagov, E. Kudryashova, O. Kuznetsova, and T. Mokaev. Comments on van Paemel's mathematical model of charge-pump phase-locked loop (PDF) . Differential Equations and Control Processes. 2019, 1 : 109–120 [2021-06-16 ] . (原始内容 (PDF) 存档于2022-01-20). ^ 5.0 5.1 N. Kuznetsov, M. Yuldashev, R. Yuldashev, M. Blagov, E. Kudryashova, O. Kuznetsova, T. Mokaev. Charge pump phase-locked loop with phase-frequency detector: closed form mathematical model 1901 (1468). 2020. arXiv:1901.01468 ^ 6.0 6.1 6.2 N.V. Kuznetsov, A.S. Matveev, M.V. Yuldashev, R.V. Yuldashev. Nonlinear analysis of charge-pump phase-locked loop: the hold-in and pull-in ranges. IFAC World Congress. 2020. arXiv:2005.00864 ^ Fahim, Amr M. Clock Generators for SOC Processors: Circuits and Architecture. Boston-Dordrecht-London: Kluwer Academic Publishers. 2005. ^ P. Curran, C. Bi, and O. Feely. Dynamics of charge-pump phase-locked loops. International Journal of Circuit Theory and Applications. 2013, 41 (11): 1109–1135. doi:10.1002/cta.1814 ^ C. Hedayat, A. Hachem, Y. Leduc, and G. Benbassat. Modeling and characterization of the 3rd order charge-pump PLL: a fully event-driven approach. Analog Integrated Circuits and Signal Processing. 1999, 19 (1): 25–45. S2CID 58204942 doi:10.1023/A:1008326315191




































































 .
.